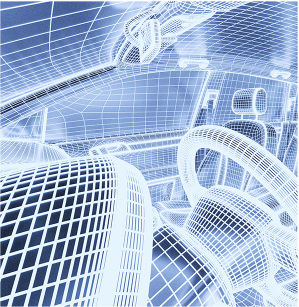
成果图
SLAM100旋转式扫描,顶部和底部数据均匀,角落数据完整。


| 激光视场角 | *精度 |
| 270°×360° | 5cm |
| 点频 | *大测距 |
| 320kpts/s | 120m |
| 相机分辨率 | |
| 3×500万pxs |


选用三颗500万像素摄像头,形成水平200°、垂直100°视场角,可同步获取纹理信息,生成彩色点云和局部全景图。







全景相机
|

GPS模块
|
飞机
|
车载
|
背包
|
外接电源
|


逆向工程
|

容积测量
|

竣工测量
|

溶洞、巷道
|

林业调查
|

立面测量
|
地形测绘
|

房产测绘
|

数字化管理
|

方量计算
|

古建筑保护
|

地下空间
|
|
逆向工程
|
容积测量
|
竣工测量
|
|
溶洞、巷道
|
林业调查
|
立面测量
|
|
地形测绘
|
房产测绘
|
数字化管理
|
|
方量计算
|
古建筑保护
|
地下空间
|


扫码关注公众号

扫码关注视频号
 晋公网安备 14010902000761号
晋公网安备 14010902000761号